


WHAT WE DO
Data Engineering
We design, build and run data platforms at petabyte scale.
Data Science
We analyse your data and generate insights for your team.
DevOps
We handle your infrastructure as managed service.
We handle your infrastructure as managed service.
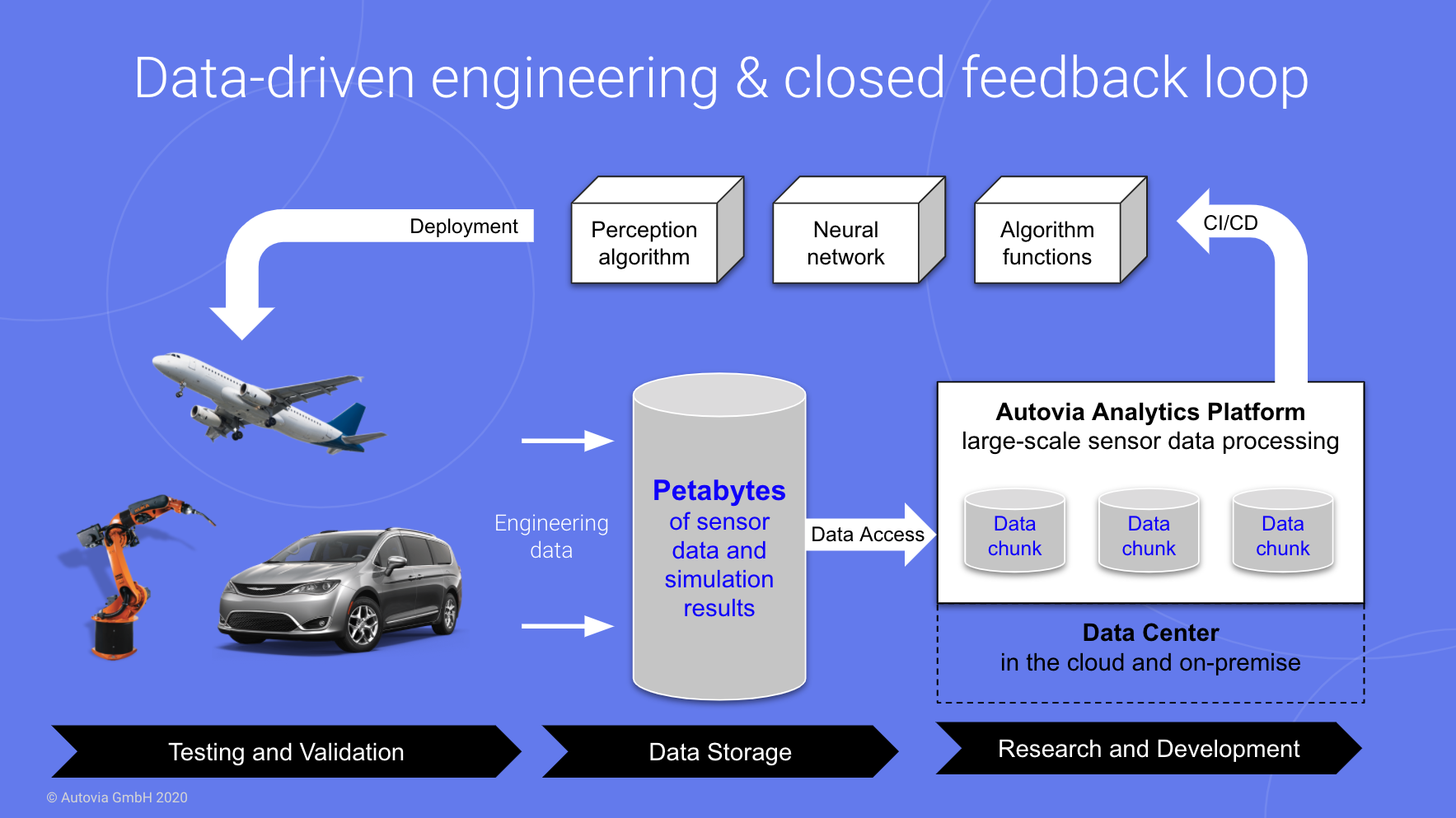
AUTOVIA STUDIO
Data Analytics for Engineers
Autovia Studio is the big data platform for processing large amount of engineering data as a managed service. Autovia works on existing big data infrastructure, on bare metal or in the cloud. It can ingest R&D data directly from HDFS, AWS S3, Azure Data Lake or any other data source.
- Access, analyze and compute sensor data
- Collaborate with interactive notebooks
- Fast search at sensor level
- Explore and validate data at sensor level
- Train and eval ML models at scale
Data Services Portfolio
We have been supporting our customers in data product engineering and introduction of data + AI platforms.
- Data Strategy and Product Management
- Data Engineering and Cloud Migration
- DevOps and Site Reliability Engineering
- Data Science and Big Data Analytics
- Data Platform Design and Maintainance
Filesystem for Engineering Data
We provide a virtual filesystem that enable applications on Windows, Mac, and Linux to read engineering data from local and cloud storage.
- Support for Win, Mac, and Linux
- Access data from AWS, Azure, GCP
- Build-in engineering data parser
- No copying and converting needed
- Support your legacy applications
We give all of our clients and software users personal attention
